

By Ralph R. Gregory, D. C.
Vol. 3, No. 4, October, 1982
THE PROBLEM
To move a subluxated vertebra from one misaligned position to another misaligned position does not constitute a vertebral adjustment. A vertebra misaligns before it subluxates, and it is to move the misalignments of the subluxation to normal position that the adjuster applies physical energy in the form of an adjustment. If a subluxation could occur without first misaligning, the application of an adjustic force would not be indicated. Some other form of energy – chemical, electrical, thermal – would suffice to remedy the detrimental effects produced by the subluxation. Adjusting is a process that contains the elements of displacement and replacement.

Figure One: The reduction pathway (N- T Resultant) computed from x-rays and the adjuster’s episternal notch to transverse distance f or a C-1 subluxation requiring vertical and horizontal vectors of 5 inches.
More, however, is essential to a C1 vertebral correction than the application of physical energy or force. The force itself must be carefully directed along a predetermined pathway that is calculated to reposition the misaligned vertebra (Fig. 1). To apply force to a vertebra indiscriminately makes no more sense than to attempt to move an object to a specific place without regard to the application and line of direction of the moving force. A random force applied to any object will not direct it to the desired point, nor will the application of an aimless force reset a misaligned and subluxated vertebra.
The problem becomes infinitely more serious if chiropractic is to validly research the effects of the subluxation and its correction on the human body. Without such research, the subluxation and its correction the essential nature of chiropractic will continue to be supplanted by other methods. The argument could be defended that one of the chief reasons that the profession is so divided today stems from the fact that the potential of the subluxation and its correction has not been fully and adequately researched. No one really knows the scope of the subluxation system, or its effects on the human body. And no one can seriously contend that a subluxated C1 vertebra that is not corrected can be validly researched as to its beneficial effects. Correction of the C1 vertebra is prerequisite to valid research.
Normalizing a subluxated vertebra’s position is, of course, elemental to chiropractic. D. D. Palmer, the discoverer of chiropractic, stated in 1910 that “Adjustments are only made when the vertebra is returned to normal position.”1 This concept in Palmer’s day may never have been realized in upper cervical adjusting, because chiropractors then did not have the advantages that relevant kinesiological and biomechanical principles offer the modern chiropractor who seeks to correct subluxations. Nor could the early chiropractor test the effects of his adjustments other than symptomatically, a subjective means at best. In short, the early chiropractor lacked today’s procedures and methods of the physical sciences whose principles are relevant to the art of adjusting vertebra.
Control and direction of the adjustic movement presents no problem in the thoracic and lumbar spine, because the adjustic force direction is conditioned by the size, shape, and location of the vertebral facets – a built-in reduction pathway exists. In the upper cervical spine, no reduction pathway exists to guide the introduction of the adjustic force. Predetermining the upper cervical reduction pathway is a mathematical procedure, calculated from a detailed analysis of the X-ray films for each subluxation. Palpatory methods are not accurate and too subjective to establish the exact relationships between the abnormal movements of upper cervical vertebrae into different planes of motion, a necessity in establishing a reduction pathway vector.
Yet, precision of analysis and adjusting in the upper cervical spine is imperative, because of the widespread detrimental influence of these subluxations on the central nervous system. Imbalance between the facilitatory and inhibitory neurological mechanisms in the caudal end of the brain stem of the subluxated person results in over-innervation of the motor neurons of the spinal cord, spastic contracture of the spinal extensor musculature, pelvic imbalance, distortion of the spine from the vertical axis of the body, displacement of the body’s center of gravity, and the contractured (short) leg. Adjustments applied to spinal segments subjacent to C1 fail to remedy these widespread effects.
After the reduction pathway, or final resultant of the force vectors, is computed from the X-rays, correction of the C1 complex presents another problem: skillful performance of the adjustic motor skill.
Adjusting the C1 subluxation complex is a motor skill because its successful performance demands timed and physiologically economical movements of the adjuster’s body to produce the desired result. Gowitske and Milner define a motor skill as a group of simple, natural movements combined in a new or unusual manner to achieve a predetermined objective.2 The C1 adjustment fits this definition; it is a combination of simple, natural movements designed to produce rectilinear motion through the final resultant of force vectors or the reduction pathway of a given C1 subluxation to achieve the objective of restoring the spine and the pelvic girdle to the vertical axis (normal) of the body. Like any motor activity, the C1 adjustment is based upon kinesiological and mechanical principles essential to skillful performance.
Mechanics is the science that deals with the motion of bodies under the action of forces, including the body that remains at rest. Statics, kinematics, and kinetics are the three branches of mechanics. The C1 adjuster is chiefly concerned with kinetics, a subject dealing with the principles with which to predict the motion that will occur in any given situation. These kinetic principles guide the C1 adjuster in determining his body movements during the adjustic phases of a given C1 subluxation.
Body motion is produced by force and force in the body is produced by muscular contraction. The adjuster uses his body as a machine to accomplish work; to release the potential mechanical energy in the final, or kinetic, phase of the C1 adjustment that predictably should correct the misalignment factors of the C1 subluxation. He is, therefore vitally interested in the mechanics of motion, force, and direction. How skillfully he performs the adjustic motor skill determines how well he accomplishes the work of re-aligning the vertebra or vertebrae of the subluxation complex.
Force is the instigator of motion. It is a vector quantity tending acceleration of an object in the direction of its application. The direction of the application of force is vital in adjusting C1 subluxations, and is the reason for analyzing X-ray films so as to compute the vectors that determine the direction of the adjustic force for a given C 1 subluxation. The C1 subluxation – lacking a built-in reduction pathway as in the case of the subjacent vertebral segments – requires precise direction of the adjustic force (Fig. 1). The C1 adjustment is a structured adjustment, a planned adjustment, not unlike the specifications of any proposed structure.
Force is a vector quantity because it possesses both magnitude and direction. Force is a carrier of both these elements. Failure to structure C1 adjustments from a complete Xray analysis, to compute and know the pathway of reduction that will correct a C 1 subluxation, results in failure to correct the subluxation, because the adjuster simply cannot do what he does not know how to do. The force of her or his adjustment is misdirected and the magnitude of the forces is excessive because more force and depth are required to move the vertebra along a pathway that is wrongly computed. The danger of increasing the misalignment factors of C1 is considerable with resulting trauma to the patient and compounding the future problem of vertebral correction.
The magnitude of force required to adjust a C1 subluxation varies according to the type of subluxation and the resistance offered by the skull and the vertebral structures subjacent to C1. If the adjustic force is properly delivered along the subluxation’s reduction pathway, the amount of force and depth is minimal, not exceeding 20 pounds and usually less in the majority of cases. A number one basic type generally requires more force than a number two or three basic type (see Monograph Vol. 2, No. 10 for explanation of basic types).
Depth used in the C1 adjustment is never an aid in correcting C1 subluxations. If either force or depth exceeds the required amount to correct the subluxation, buckling of the cervical spine and an increase in the size of the misalignment factors occurs. The buckling of the cervical spine takes place at the superior articulating surfaces of C2, the cervical spine’s weakest point. Depth and excessive force are traumatic to the patient; and, in susceptible cases, increases the danger of vascular accident.
Failure, then, to skillfully perform the adjustic motor activity results from not structuring the adjustment from a detailed analysis of the X-ray films; and not performing the adjustic action according to relevant mechanical principles. Chiropractic is a mechanical science, or, more properly, an art form that should be developed from relevant mechanical principles. The majority of systems for adjusting C1 subluxations today have not advanced along kinesiological principles; they are mechanically inept because they violate these mechanical principles. These systems continue to be practiced because few practitioners take comparative X-rays (posts) after the first adjustment of the patient to determine vertebral correction, if any. Nor do many practitioners use post procedures to ascertain the effects of upper cervical adjusting on pelvic malalignment, spastic contracture of the spinal extensor musculature, the contractured (short) leg, and other known bodily effects of a C1 subluxation. The problem is two-fold.
METHODS OF ADJUSTIC MEASUREMENT
For years several methods and tools have been devised to test the performance of the adjustic motor skill. The oldest and best test is the comparative (post) X-ray, taken immediately following the first adjustment. The post X-ray is conclusive as to its findings; it not only verifies the correctiveness of the analysis, but indicates the degree of the skill of the adjuster. Comparative X-rays ascertain the degree of vertebral reduction, and, thereby, protect the patient against analytical errors and non- skillful performance.

Figure Two: Side View
Analyses of the effects of the C1 adjustment on the body before and after the adjustment, using an anatometer (Fig. 2) provides evidence of the skillful performance of the adjuster. The anatometer, a device for measuring spinal and pelvic distortions caused solely by a C1 subluxation, correlates bodily distortion with the misalignment factors of the C1 subluxation. Pre and post recordings on this device provide a dramatic picture of the skillful performance of the C1 adjustment.
Another study for determining if rectilinear force is expressed through the reduction pathway (notch-transverse resultant) is the light pattern device. This device consists of a harness attached to the adjuster’s body which contains two small spotlights representing force emanating through the adjuster’s parallel forces or action lines (episternal notch and pelvic center of gravity). In a dimly lighted room, the adjuster can see his adjustic movements throughout the potential phases of the adjustment and during the kinetic phase reflected on the floor. Because a C1 adjustment must be delivered so that the adjuster’s parallel forces or action lines are coplanar with the subluxation’s reduction pathway to achieve rectilinear motion, the light pattern device is especially valuable because a visual feedback is obtained.
The videotape provides another tool for analyzing the expression of the adjustic force. Because a tape can be “frozen” at any point, a detailed study can be made of the performance of the phases and steps of the adjustic complex.

Figure Three: Coordinator
The light pattern and the videotape studies required a device with which the adjuster can practice various C1 adjustments. To fill this need, the coordinator was devised in 1946 (Fig. 3). This simple tool permits the adjuster to practice C1 subluxations. It consists simply of a metal stool with a series of horizontal resultants (force vectors) marked on its wooden top. A rubber plunger having a resistance of 7-10 pounds is centered on the wooden top, its tip representing the point of the application of forces, or the contact point.
The great value of the coordinator is in conditioning the adjuster to perceive through his senses an awareness of his muscle and joint movements, the relative alignment of his body parts in space to the action lines, and the correct distribution of his body weight. The skillful adjuster always knows through feedback the position of her or his bodily parts in relation to the C1 subluxation being addressed. She or he knows, therefore, how to “aim” the parallel forces or action lines.
Mastering feedback requires concentration. By sensing the direction in which the coordinator rubber top moves after meeting the resistance, the adjuster is advised of the accuracy of her or his stance, the alignment of bodily parts, and, resultantly, the angle of the adjustic action lines. The direction of any force is along its action lines which should be coplanar with the final resultant of the force vectors essential to reducing the subluxation. The adjuster should of course practice different subluxations.
 Figure 4 depicts the adjustic action line for a left anterior subluxation of approximately 5 degrees. The force along the action line has successfully overcome the resistance of the coordinator top without turning or changing, a successful application and direction of force coplanar with the computed resultant of force vectors. The adjuster’s feedback advises her or him that the force of the action line has not been shunted off at a tangent as it meets and overcomes the coordinator’s resistance.
Figure 4 depicts the adjustic action line for a left anterior subluxation of approximately 5 degrees. The force along the action line has successfully overcome the resistance of the coordinator top without turning or changing, a successful application and direction of force coplanar with the computed resultant of force vectors. The adjuster’s feedback advises her or him that the force of the action line has not been shunted off at a tangent as it meets and overcomes the coordinator’s resistance.
As the adjuster develops a good sense of feedback by practicing different adjustments, it soon becomes clear that various responses of the coordinator to the adjustic force occur. Figure 5 shows a frequently observed occurrence when the force of the action line breaks sharply downward and backward after meeting resistance. If this tangent of force occurred in adjusting a C1 subluxation, the post X-rays would disclose no reduction of the rotation of C1 and little, if any, reduction of atlas laterality. Rotations of subjacent vertebral segments would not be aligned to the vertical axis of the body because the force along the action line would not correct angular rotation of the cervical spine into the frontal plane. It is quite probable that rotation would be increased; and, in basic types two and three, angular rotation would be increased.
These vertebral misalignment increases would, within a few days, increase the neurological detriment which would be expressed in the patient’s body as a greater degree of spastic contracture of the spinal extensor musculature or a change in spastic contracture to the opposite side of the body. Either a greater leg disparity than originally observed, or an opposite leg length deficiency, would occur.
Too frequently, an adjuster activates the adjustic force from too low a point on the triceps muscles. This error causes the force along the action line to enter the coordinator top but to reverse itself because no follow-through results. Shortly afterward, the action line attempts to re-establish its direction. Figure 6 depicts this situation. Maximal reduction of the C1 subluxation complex is not achieved because the atlas-lever becomes locked between the occipital condyles and the superior articulating surfaces of C2. Another reason for this type of error is a breakdown of the contact hand.
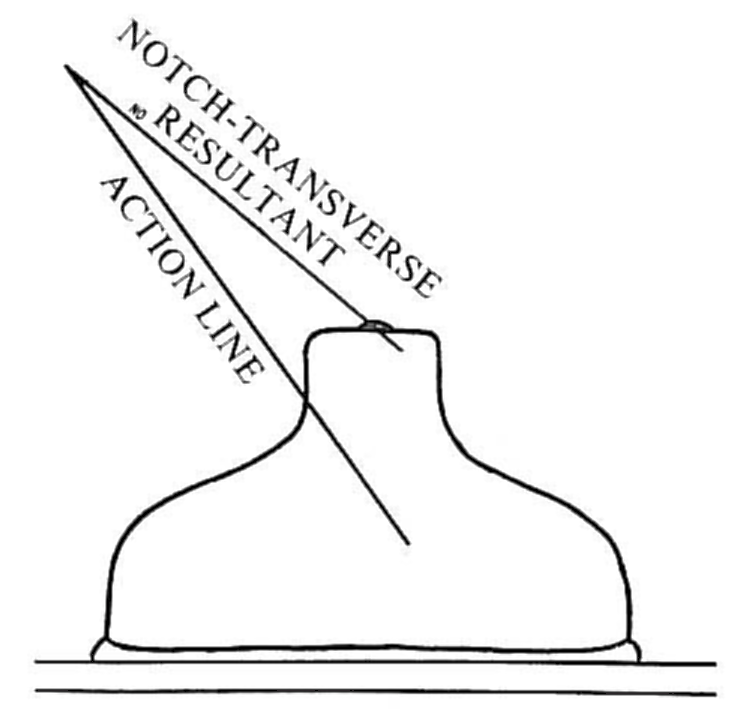
Figure seven
All of these figures depict faults in body stance and triceps contraction. A very common error is seen when the adjuster’s shoulder and pelvic girdle are not aligned so that the parallel forces or action lines emanating from the episternal notch and the pelvic center of gravity do not align with the final resultant. Most frequently the parallel force or action lines fall short, as depicted in Figure 7. Obviously this error defeats any attempt to reduce the misalignment factors of the C1 subluxation complex. The remedy of this fault is for the adjuster to achieve that angulation of his shoulder and pelvic levers that will angle his parallel forces along the reduction pathway of the particular subluxation he is addressing.
Posterior C1 subluxations present the same or similar adjustic errors as anterior C1 subluxations. Posterior subluxations are frequently more difficult for the C1 adjuster than are anteriors if the rotation vector is large, because it is difficult to align the parallel forces to the reduction pathway by leaning over the patient’s body. Extreme posterior rotations, therefore, can generally be reduced more successfully by reversing the contact hand and adjusting from behind the patient. The torquing motion to correct the axis spinous process must also be reversed when changing contact hands.
This discussion of adjustic errors is not inclusive. It merely points out some of the more obvious reasons why C1 subluxations do not decrease, and in some instances may increase. The forces along the action lines can easily be deflected by resistances unless the adjuster contracts his triceps muscles completely and properly. Much depends upon the stance of the adjuster being positioned so that his parallel forces align to the reduction pathway of the subluxation or the notch-transverse resultant, shoulder and pelvic levers positioned at right angles to the parallel forces which must be coplanar with the notchtransverse resultant, how correctly the potential phases of the adjustment are performed to obtain alignment, and how accurately the adjuster’s center of gravity backs up the adjustment. Efficient adjusting is largely a matter of mechanics.
KINETIC PHASE DISCUSSION
The most difficult phase of the adjustment obviously is the final or kinetic phase. The seven potential phases that precede the final phase are for the purpose of aligning the adjuster’s body levers so that his parallel forces are coplanar with the reduction pathway of the subluxation. These seven potential phases determine the adjuster’s stance so that the desired alignment is accomplished and rectilinear adjustic force can be delivered along the reduction pathway. (The reader is referred to Monograph, Vol. 3, No. 1 for a discussion of the potential phases of the adjustment.)
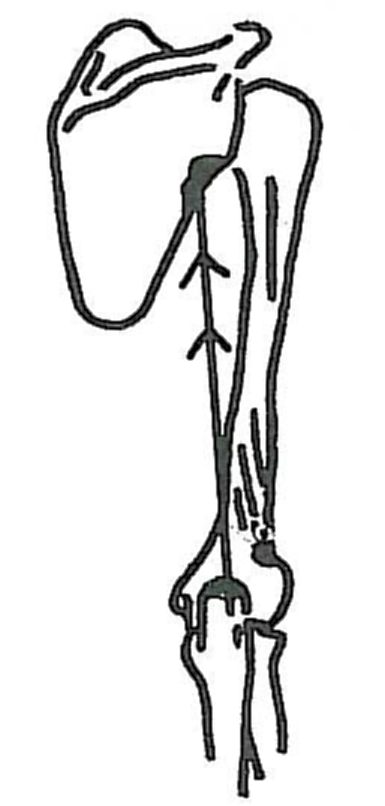
Figure Eight: Line of Pull
The adjuster initiates the kinetic phase by contracting his tricep muscles along their line of pull -a straight line between the muscle’s insertion in the olecranon process of the ulnar bone and the origin of the long head in the infraglenoid tuberosity of the scapula (Fig. 8). The direction of the line of pull is upward and, when the shoulder girdle compresses from the muscular contraction, somewhat medialward.
The function of the triceps brachii is to adduct the arm and to extend the forearm. In the adjustic act, the muscular contraction is started from a point below the glenohumeral joint of about one-and-one-half inches so as to somewhat reverse the muscle’s function and accentuate shoulder girdle contraction. This reversal of function is aided by locking the roll-in hand on the wrist of contact arm, causing the effort of the muscular action to be concentrated upon the shoulder girdle.
Muscles are capable of pulling both directions from either origin to insertion or from insertion to origin. This principle is known as functional reversibility.3
Better understanding of the adjustment is obtained if the adjuster can visualize the mechanics of shoulder girdle action in the adjustment. A tricep muscle possesses the pulley action of a biaxial or two-joint muscle. That is, it acts over both the shoulder and elbow joints, but it is too short to permit complete movement of both joints at the same time. By pulling the triceps brachii along its line of pull from a point slightly below the glenohumeral joint, this joint is activated before the elbow joint. This is important to overcoming the resistance of the shoulder joint, and setting the adjustic chain in action.
Kinesiologists compare the pectoral or shoulder girdle to a threelink chain. Movements at the glenohumeral joint are always accompanied by accommodating movements of associated structures. If accommodation did not occur, the primary movement would be inhibited.4
The primary movement of the C1 adjustment is the upward and inward motion of the humeri, initiated by the triceps brachii contraction. It is the accommodating movements medialward of the adjuster’s clavicles and scapulae that permit full and uninhibited tricep brachii contraction.
A timing sequence in the adjustic act is essential between the triceps brachii contraction and the accommodating movements of clavicles and scapulae. If the adjuster’s clavicles and scapulae move even slightly ahead of the triceps brachii contraction, the result is a loss of the effort of lever and a loss of control. When the timing of the triceps brachii contraction is coordinated exactly with the movement of the adjuster’s clavicles and scapulae, momentum is transferred to the adjuster’s body mass.

Figure Nine:
E (Effort): Triceps brachii contraction
F (Fulcrum): Shoulder joint axis of motion
R (Resistance): Shoulder girdle.
In terms of levers, the shoulder girdle constitutes the resistance or the load to be moved, the glenohumeral joints are the fulcra, and the contracting triceps brachii are the effort. This is a first class lever (Fig. 9).
In overcoming the resistance of the shoulder lever by completely contracting the triceps brachii, the adjuster moves the body lever first that possesses the greatest inertia. This concept is very important in the sequence of movement, because efficient movement in a motor skill necessitates that levers of the greatest mass must move first as they possess the greatest inertia. Smaller levers, such as the elbow, should move after the shoulder lever, or later in the sequence of movement.5 If the adjuster violates this principle and initiates his adjustment from the elbows, she or he transfers little momentum to the body mass. Follow-through is lost, and usually compensated for by a so-called body-drop which reduces the length of the notch-transverse resultant, thereby reducing the height and rotation vectors, resulting in an incomplete vertebral reduction.
Applying the principle of overcoming the inertia of the shoulder girdle seems difficult for adjusters to master. This difficulty probably results from thinking in terms of the vertebra as constituting the resistance to the adjustment. This thinking introduces a push into the adjustment, and, resultantly, depth. Push and depth defeat subluxation reduction because they buckle or kink the cervical spine between the inferior borders of the lateral masses of C1 and the superior articulating surfaces of C2. The resistance of about ten pounds of the head is also overcome. C1, therefore, is prevented from moving about the condyles of occiput because the depth-force of the adjustment is transferred to the weakest point in the cervical spine – the atlanto-axial articulation.
If the push or depth-force is sufficient and the patient’s skull is turned downward on the side of laterality, the foramen magnum is forced away from the side of Iaterality. This error creates a problem because, in effect, laterality is increased. The effect is much the same as when the head is used as a lever in an attempt to adjust a cervical vertebra by thrusting it. These systems are mechanically inept because the head constitutes part of the resistance to cervical vertebral movement in adjusting.
A C1 adjustment is a contraction of the triceps brachii, the effort of the first class lever, so as to overcome the inertia of the adjuster’s shoulder girdle. The adjuster, in other words, is not attempting to overcome the resistance offered by the C1 subluxation complex but the resistance of his own shoulder girdle. The amount of resistance of the adjuster’s shoulder girdle is far greater than that of the vertebral subluxation; and, by activating the shoulder girdle, the adjuster contains the greater force within his body. Activating the shoulder girdle imparts momentum to the adjuster’s body mass and follow-through down the reduction pathway, provided the alignment of the adjuster’s body levers is coplanar with the notchtransverse resultant.
Speed is frequently considered an asset in adjusting. Speed of muscle contraction is of little value in overcoming resistance because speed of muscular contraction violates the principle that the greater the speed of contraction, the less force generated or load moved, and the greater the load, the less the velocity of shortening.6 Maximal contraction of the triceps brachii is the requirement for efficient performance, not speed of contraction. The load to be moved is the adjuster’s shoulder girdle, and the more complete the triceps brachii contraction, the greater the compression of the shoulder girdle, the medialward force generated by the muscular contraction. Obviously, if the load resistance equals the effort of the triceps contraction, the result equals zero. Effort balances resistance and no movement takes place about the fulcra.
Adjusters frequently have problems overcoming the resistance of the shoulder girdle to the triceps brachii contraction, because they contract or tighten the shoulder musculature. Resistance can be reduced considerably if the adjuster consciously relaxes her or his shoulder musculature prior to contracting the triceps brachii. If the shoulder girdle resistance is not overcome, momentum and follow-through will not occur and the degree of C1 reduction will be slight.
Protection for the patient is assured by control of adjustic forces that don’t directly invade the cervical spine, and maximal reduction of the misalignment factors is obtainable only by control of adjustic force. The upper cervical spine cannot absorb forces that are greater than its resistances. If it does, it subluxates; and uncontrolled adjustic forces subluxate it more.
The amount of adjustic force that can be safely entered into a patient’s neck is controlled by a sort of built-in resistance mechanism. This resistance mechanism varies depending upon the classification of the subluxation, the size of the superior articulating surfaces of C2, the degree of excursion of the cervical spine into a frontal plane, and other factors. Whenever the adjustic force exceeds these resistances, trauma can result.
The exact amount of force required to correct a given C1 subluxation has not been specifically computed. Fairly accurate limits, however, for each of the basic types have been determined. Spinal and skull resistances can be reduced by patient placement, based on the basic type of subluxation and the center of gravity of the skull. Each C1 subluxation responds to the exact amount of force necessary to overcome the resistances that are incorporated in the cervical spine.
Kinesiologists explain that efficiency in performing any motor skill depends on the relationship between the amount of work accomplished and the force or energy expended.7 This relationship is vital in adjusting C1 subluxations. The system incorporating the force of the triceps brachii in overcoming the adjuster’s shoulder lever recognizes and practices the work-force principle. If ten pounds of force is required to correct a given C1 subluxation, the vertebra will normalize at the same instant that the adjuster’s triceps brachii have exerted ten pounds of force against her or his shoulder lever. Thus, a built-in mechanism operates that controls force and protects the patient.
Another principle should be observed in performing the efficient C1 adjustic motor skill. That principle states that the position of a limb is a factor in the intensity of response when a muscle contracts by means of cortical stimulation.8 Significant to the C1 adjuster, therefore, is the bend of her or his elbow angles; the more acute the bend, the stronger the response. Reduction of the elbow angle is obtained by drawing back the contact arm from the shoulder.
The C1 adjuster must always bear in mind that lateral movement of the C1 vertebra about the occipital condyles takes place efficiently if it moves first on the superior articulating surfaces of C2. In adjusting any type of C1 subluxation, C1 must move down and around or up and around the superior articulations of C2. If C1 does not move in this manner, it is blocked from moving about the occipital condyles. C2 is the base of support for C1 and the skull and first moving the C2 vertebra facilitates the movement of C1. This concept makes laterality reduction of C1 easier.
The size of the articulating surfaces of C2 vary in different patients. The larger the size, the greater the resistance to reducing C1 on the occipital condyles. The distance, therefore, that C1 has misaligned on the occipital condyles is not the factor that requires more adjustic force. The amount of force required to move a large C1 laterality is no greater than that needed to move it a lesser distance. The problem of larger lateralities of C1 is solved by adjusting the height vector to accommodate the size of the articulating surfaces of C2.
CONCLUSION
For several years tests have provided ample evidence that adjusting a C1 subluxated vertebra is a motor skill that requires a high degree of efficiency on the part of the adjuster if the objective of subluxation correction is to be achieved. Adequately supported also is the need for the establishment of the reduction pathway, computed from X-ray. Mechanically inept methods of adjusting subluxated C1 vertebrae and methods utilizing no previously computed pathway fail to correct C1 subluxations and may prove traumatic to the patient.
The application and the direction of adjustic force are vital elements in correcting C1 subluxations. Control of these two elements requires an understanding and application of the relevant principles of the physical sciences. Adjusting, as now taught and largely practiced, rarely incorporates these principles.
A two-fold problem too long ignored exists insofar as correction of the C1 subluxation is concerned. This problem must be remedied because the detrimental physical and measurable distortions effects of the C1 subluxation have long been proved to exist throughout the human body. Valid research, furthermore, of the response of the body to a C1 correction requires first that the correction be made.
REFERENCES:
- Palmer, Daniel David: The Science, Art and Philosophy of Chiropractic, 1910, Portland Publishing House Company, Portland, Oregon, pg. 11.
- Gowitske, B.A. & Milner, M.: Understanding the Scientific Basis of Human Motion, 2nd Edition, 1980, Williams & Wilkins Company, pg. 317.
- Groves, R. & Camaione, D.N.: Concepts in Kinesiology, 1 975, W.B. Saunders Company, Philadelphia, pg. 35.
- lbid. pg. 53.
- lbid. pg. 71.
- Ibid. pg. 183.
- Wells, K. & Luttgens, K.: Kinesiology, Scientific Basis of Human Motion, 6th edition, 1976, Saunders Publishing Company, Philadelphia, pp. 516-517.
- lbid. pg. 67.